

Engineering
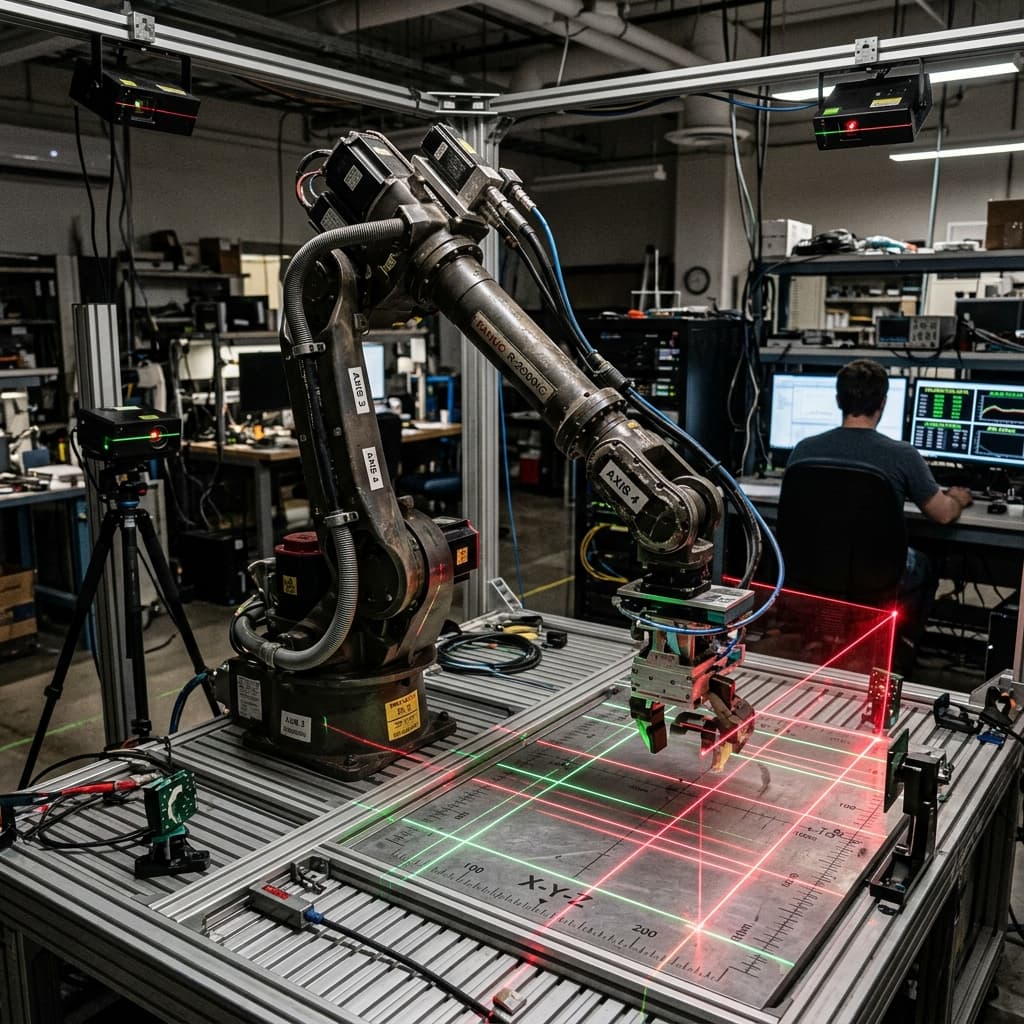
Kinematics
Transform abstract spatial coordinate targets into precise physical trajectories using advanced rigid body mathematical modeling algorithms.

How we approach Kinematics
Navigating continuous three dimensional space requires profound foundational mathematics. Our core robotic kinematics engines process simultaneous complex inverse transformations mapping singular end effector goals into distributed joint torque requirements. This computational mastery allows chaotic physical platforms to achieve submillimeter precision manipulating hazardous targets.
Physical mechanical binding limits pure academic kinematic trajectory models. Practical implementation must account for exact joint friction coefficient variations thermal expansion rates and inherent material flex during high velocity swings. We bake these complex physical variables directly into the primary calculation matrix preventing unacceptable localized overshoot.
Singularity points pose extreme danger toward continuous articulate movement. When robotic joint axes align into parallel lines traditional mathematics return infinite calculation demands triggering catastrophic mechanical lockup. Our custom solver algorithms detect impending singularity horizons automatically deviating trajectory paths preserving continuous fluid motion.

Forward kinematics grant the control logic absolute spatial awareness. By constantly polling thousand count absolute encoders nested within every joint the central processor builds exact virtual twins representing current physical postures. This constant verification loop guarantees the software model never diverges from absolute physical reality.
Redundant degree of freedom platforms offer infinite theoretical pathing solutions toward a single objective coordinate. Utilizing advanced Jacobian transposed matrix formulations our systems score potential routes based upon localized energy consumption minimizing overall mechanical wear extending absolute lifespan limits.

Related areas in this practice
Mathematical mechanical bridging
Converting human intended spatial vectors into synchronized multi motor propulsion creates the absolute foundation supporting modern automation constructs.
- Custom silicon logic gates accelerating raw inverse matrix operations eliminating traditional CPU calculation latency.
- Dynamic payload compensation algorithms recalculating pure center of mass upon securing heavy external cargo objects.
- Predictive collision checking logic evaluating complete geometric sweep volumes prior to initializing physical routines.

Talk with engineers who own the work
Request a technical pass on Kinematics: constraints, risks, and a practical next step with clear assumptions.